Studienarbeit
Beschreibung der Kinematik radgebundener Roboter
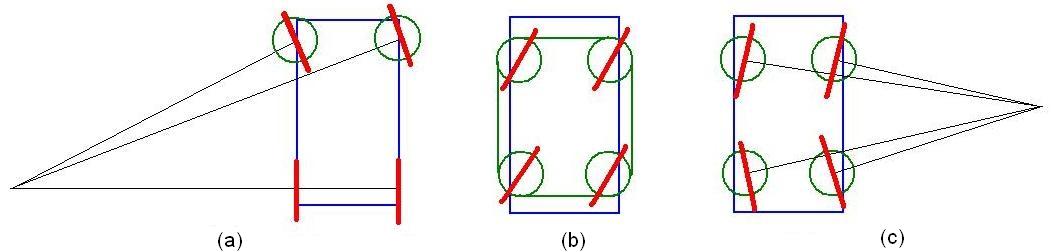
Für autonome mobile Roboter sind verschiedenste Formen der Antriebskonfiguration denkbar. Der gängigste und kinematisch am einfachsten zu beschreibende Aufbau ist der differentielle Antrieb. Über zwei Motoren, mit linear angeordneten Achsen lassen sich durch unterschiedliche Geschwindigkeitsvorgaben sequentiell beliebige translatorische und rotatorische Bewegungen ausführen. Entsprechend kann die Bewegung des Roboters anhand von einfachen Gleichungen beschrieben werden. Problematisch für größere Roboter sind an diesem Aufbau die zur Stabilisierung nötigen und das System beeinflussenden Stützräder. Die dazu alternativ anwendbaren Dreirad- oder Ackermann-Fahrwerke benötigen dagegen bereits für einfache Navigationsvorgaben mehrstufige Bewegungsfolgen. Synchrone Antriebsplattformen eröffnen mit der gleichgerichteten Lenkbarkeit aller Räder zusätzliche Freiheitsgrade. Roboter mit unabhängigen lenkbaren Antriebseinheiten, wie Q, ein Roboter der Arbeitsgruppe für Eingebettete Systeme und Betriebssysteme, versuchen die Vorteile dieser Ansätze zusammenzufassen.
Als Basis für weitere Arbeiten ist eine Zusammenfassung der grundlegenden kinematischen Modelle der genannten Antriebssysteme zu erarbeiten. Darauf aufbauend sollen für verschiedene Roboterdimensionen sowie Navigations- und Umgebungszenarien Kenngrößen entwickelt werden, aus denen Aussagen zu Vor- und Nachteilen der Antriebssysteme abgeleitet werden können. Für die Visualisierung der Ergebnisse ist eine entsprechende Umgebung in Matlab zu erstellen.
Gesucht wird ein(e) an der Robotertechnik interessierte(r) Student(in) mit Freude an mathematischen Modellbildung und Simulation. Programmierkenntnisse unter Matlab sind von Vorteil.
| Aufgabenstellung: | Prof. Dr. rer. nat. Jörg Kaiser |
| Betreuer: | Dipl.-Ing. Sebastian Zug |
| Diplomand: | N.N. |
| Bearbeitungszeitraum: | N.N. |
| Status: | nicht vergeben |