Diplomarbeit
Entwurf eines Regelungs- und Steuerungssystems für einen mobilen Roboter
Radgestützte, (teil-)autonome Transportplattformen mit hoher Traglast sind in der Regel, einem Kraftfahrzeug ähnlich mit zwei starren und zwei lenkbaren Rädern konstruiert. Bereits einfache Positionierungsvorgänge, wie eine Drehung um 90 Grad erfordern ein entsprechenden Bewegungsspielraum und eine mehrstufige komplexe Bewegungsfolge.
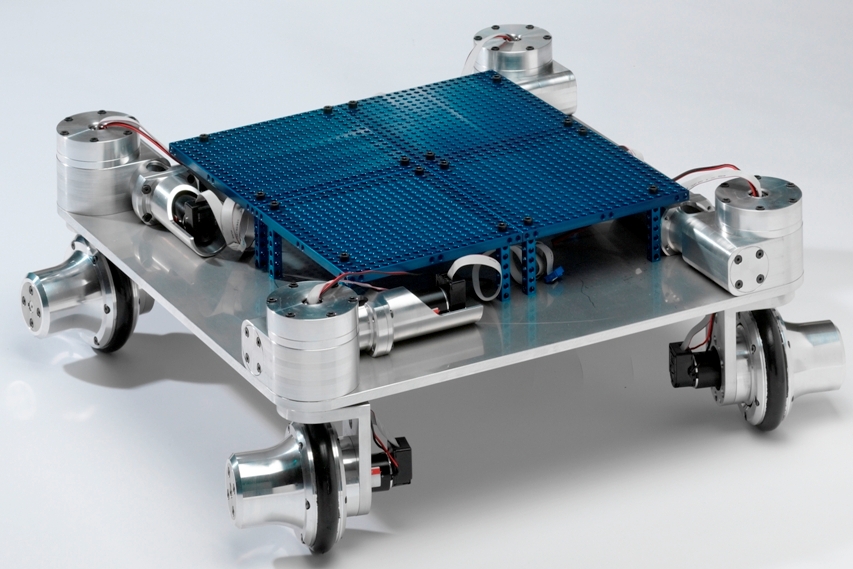
Q, ein Roboter der Arbeitsgruppe Eingebettete Systeme und Betriebssysteme, zielt auf die Bereitstellung von größter Traglast bei gleichzeitig ausgeprägter Beweglichkeit. Dafür sind die Antriebseinheiten, anders als bei synchron angetriebenen Plattformen in der Richtungsvorgabe völlig unabhängig. Darauf aufbauend können dann neben einfachen Verfahrbewegungen auch komplexe überlagerte Bewegungen, wie die Drehung um die eigene Achse bei gleichzeitiger Translation umgesetzt werden. Die Antriebseinheiten werden jeweils über einen ATMEL Mikrocontroller überwacht und gesteuert. Diese sind via CAN mit einem Rechner verbunden. Im Rahmen der Diplomarbeit soll zunächst ein geeignetes Konzept für die Steuerung und Regelung entwickelt werden. Darauf aufbauend sind ein kinematisches Modell sowie ein Regelungsmechanismus zu entwerfen, zu implementieren und zu validieren. Begleitend werden am Roboter einzelne mechanische und elektrotechnische Fragestellungen praktisch zu lösen sein.
Gesucht wird ein(e) begeisterungsfähige(r) Student(in) mit praktischen Erfahrungen aus der Mechatronik und Regelungtechnik. Programmierkenntnisse (für Mikrocontroller) unter C, C++ und Matlab sind von Vorteil.
| Aufgabenstellung: | Prof. Dr. rer. nat. Jörg Kaiser |
| Betreuer: | Dipl.-Ing. Sebastian Zug |
| Diplomand: | N.N. |
| Bearbeitungszeitraum: | N.N. |
| Status: | nicht vergeben |