Die Einschreibung für TI I wird heute Nacht um 00:00 freigeschaltet. Sie wird bis zum 19.10.2014 um 23:59 aktiviert bleiben.
Category: ‘Allgemein’
Praktische Aufgabe 5
Die letzte praktische Aufgabe der aktuellen PKES-Vorlesung wird in Abstimmung und Kooperation mit der parallel laufenden Vorlesung “Swarm Intelligence ” von Frau. Prof. Dr. Mostaghim Link durchgeführt. Dabei werden die bisher durch die Studentengruppen gebauten und implementierten Arduino Roboter gemeinsam in einem Szenario eingesetzt. Zielstellung ist die Zusammenführung der Ergebnisse zweier Vorlesungen – die Kombination der realen Roboter mit den (wenn auch stark vereinfachten) theoretischen Konzepten der Schwarmintelligenz.
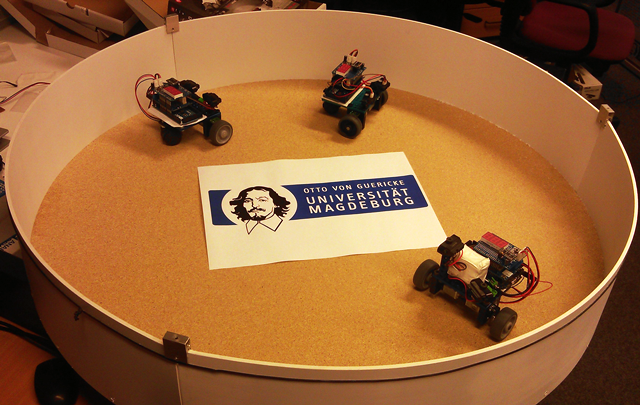
Zumindest in der Simulation funktioniert das Ganze auch schon ![]()
Letzte Vorbereitungen für das Semester
Die Vorbereitungen für die Vorlesung Prinzipien und Komponenten eingebetteter Systeme laufen auf Hochtouren. In der Veranstaltung sollen die Studenten neben den theoretischen Inhalten, praktische Erfahrungen mit eingebetteten Systemen sammeln. Neu ist dabei die Anfertigung einer kleinen Platine, die mit Sensoren, Tastern und einer 7-Segment-Anzeige, für die Programmierübungen genutzt werden soll. Erst mit dieser übergreifenden Ausrichtung der Übungselemente wird die Komplexität und die Verzahnung der verschiedenen Entwicklungsphasen eines Mikrocontrollersystems greifbar gemacht.

Sortierung der notwendigen Bauteile für die insgesammt 10 “Entwicklerteams”
MoCoRo-Projektantrag genehmigt
Die Deutsche Forschungsgemeinschaft hat den durch die Arbeitsgruppen EOS, EUK und Datenbanken formulierten Großgeräteantrag MoCoRo (Plattform für mobile kooperative Robotik) bewilligt und stellt gemeinsam mit dem Land Sachsen-Anhalt insgesamt 419.000 Euro für die Verwirklichung bereit. Damit sollen an der FIN die Voraussetzungen geschaffen werden, anhand realitätsnaher Szenarien Konzepte, Methoden und Algorithmen für zukünftige, Teamroboter zu untersuchen. Entsprechend umfasst die MoCoRo-Plattform zum einen mehrere autonome Roboter, die mit unterschiedlichen Sensoren ausgestattet sind und unterschiedlichen Fähigkeiten aufweisen. Zum anderen enthält sie die Hardware für eine mit vernetzter Sensorik instrumentierten Umgebung. Roboter kooperieren innerhalb diesem intelligenten Umfeld und bewältigen dabei Aufgaben wie die Exploration, Überwachung, Transport oder auch Montage und Wartungsarbeiten. Aus Kosten- und Effizienzgründen ist es vorteilhaft, diese Herausforderungen kooperativ anzugehen und zum Beispiel die Umgebung übergreifend und gemeinsam zu erfassen. Heterogenität der Systeme, Ausfälle, Verzögerungen und Netzwerkengpässe müssen dabei berücksichtigt werden.
oTToCAR at RoboCUP 2013
Das Institut für verteilte Systeme war mit dem ego. tech-on Projekt (Arbeitsgruppe EUK) und dem oTToCAR-Team (Arbeitsgruppe EOS) während des RoboCup Turniers am vergangenen Wochenende auf dem Stand der OvGU vertreten. Dort wurde die Universität vorgestellt, Fragen rund um das Studium in Magdeburg beantwortet und ein interaktiver Demonstrator präsentiert. Dieser stand unter dem Motto „Sehen wie ein Roboter“ und motivierte die Besucher allein anhand der Laserscannerdaten, die auf dem 1:10 Modellfahrzeug erzeugt werden, dieses in eine Parklücke zu steuern. Diese ungewöhnliche, technische Sichtweise auf ein alltägliches Problem forderte den Spieltrieb der jüngeren und den Ehrgeiz der älteren Besucher heraus. Gleichzeitig diente die Anwendung zur Verdeutlichung der Vielzahl von Problemen bei der Implementierung eines autonomen Einparkassistenten. Für die Lange Nacht der Wissenschaft haben die Studenten, die oTToCAR vertreten haben – Julian Scholle, André Himmel, Viktoria Wiedmeyer und Hannes Heinemann – eine Lösung für genau diese Anwendung versprochen.
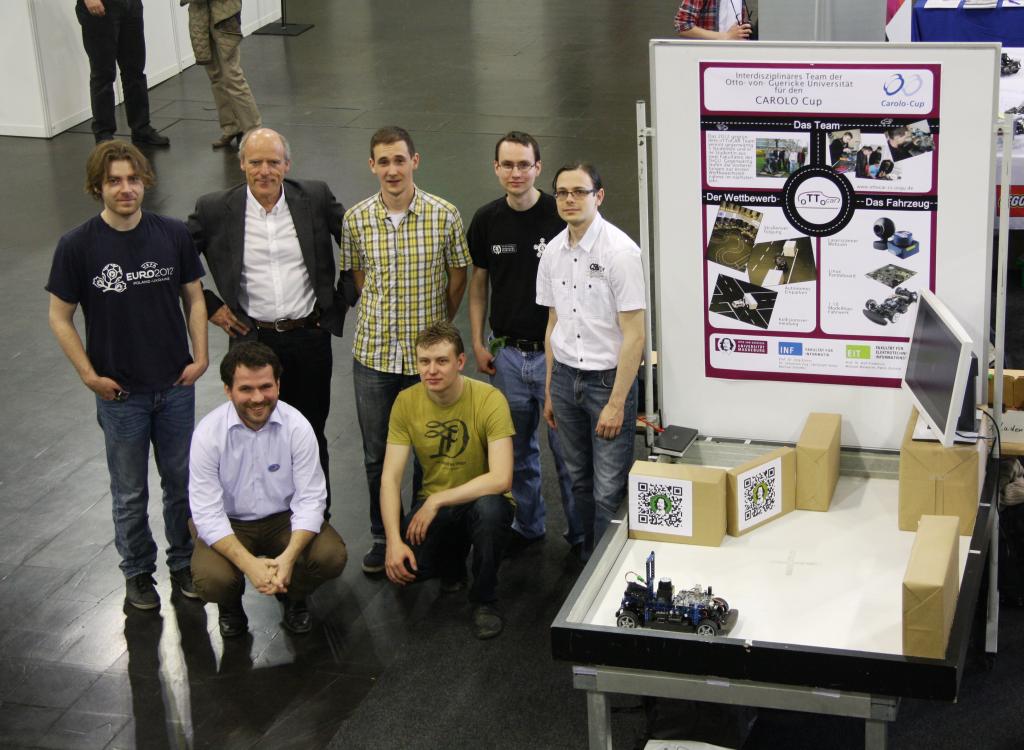
Das oTToCAR-Team mit dem Messeaufbau

Einparken für große und kleine RoboCup-Besucher
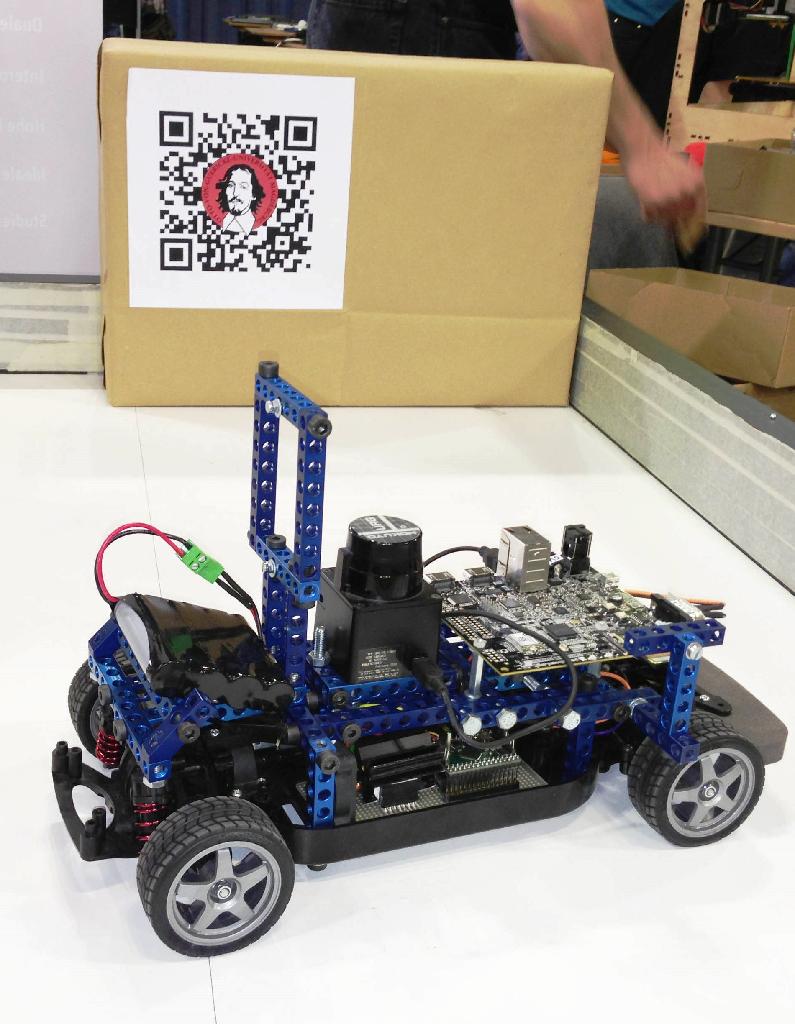
Der aktuelle Stand unseres Modells
Besuch aus Schweden
Vom 13.03.-14.03. besuchte Herr Thomas Petig als Mitarbeiter des Department of Computer Science and Engineering (CSE) der Universität Göteborg im Rahmen des KARYON Projekts die Arbeitsgruppe EOS. Innerhalb der beiden Tage wurden verschiedene Themen sehr detailiert behandelt:
- Hardwareauswahl für die KARYON-Demonstratoren
- Diskussion der aktuellen Arbeiten im Arbeitsfeld Fehlersemantiken für intelligente Sensoren
- Einführung in die Kommunikationsmiddelware FAMOUSO
- Diskussion eines Ansatzes zur Optimierung der Messdatenerfassung in verteilten periodisch-arbeitenden Anwendungen